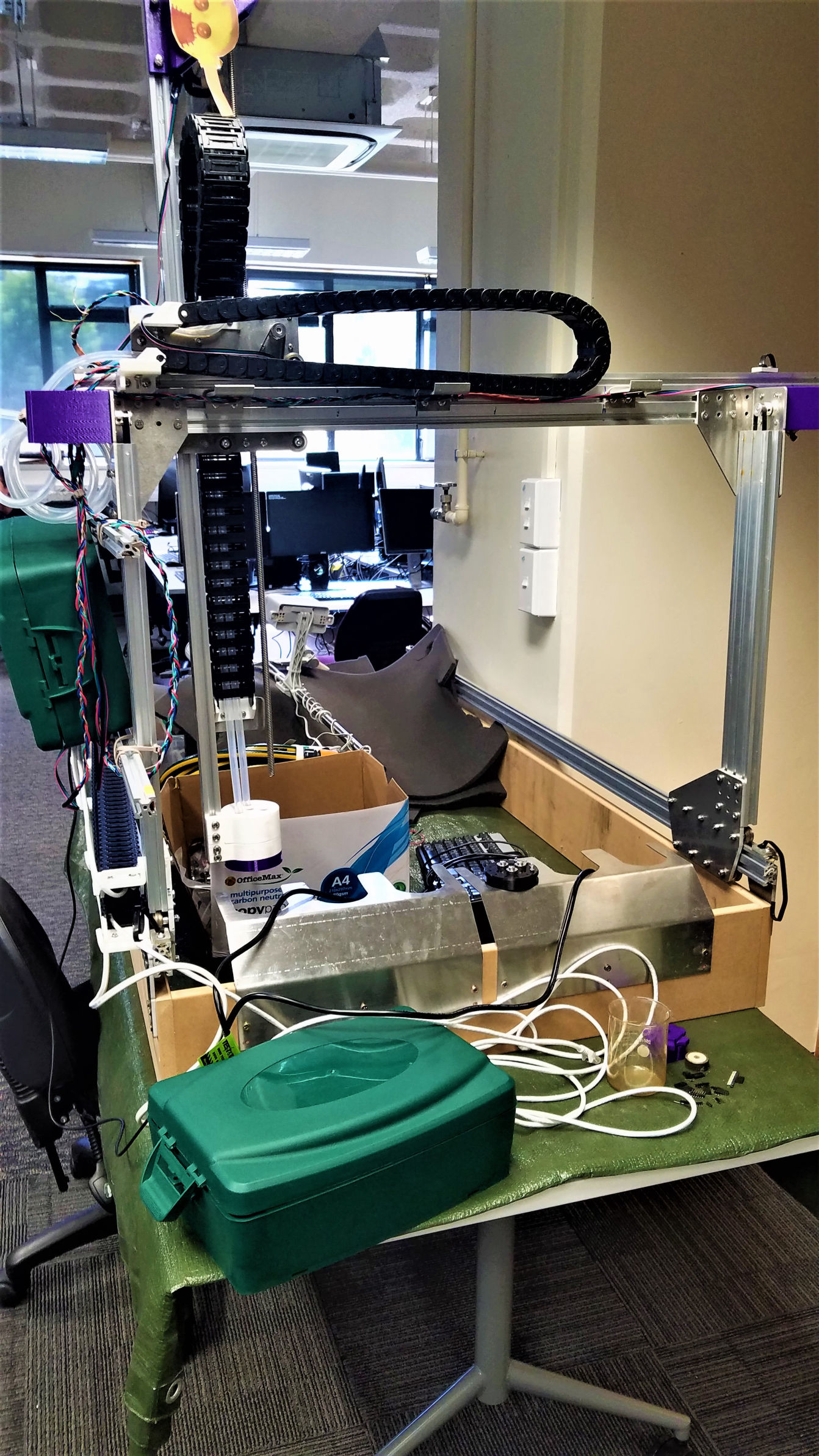
Starting off the project year, our team all agreed to continue the farmbot project from previous years.
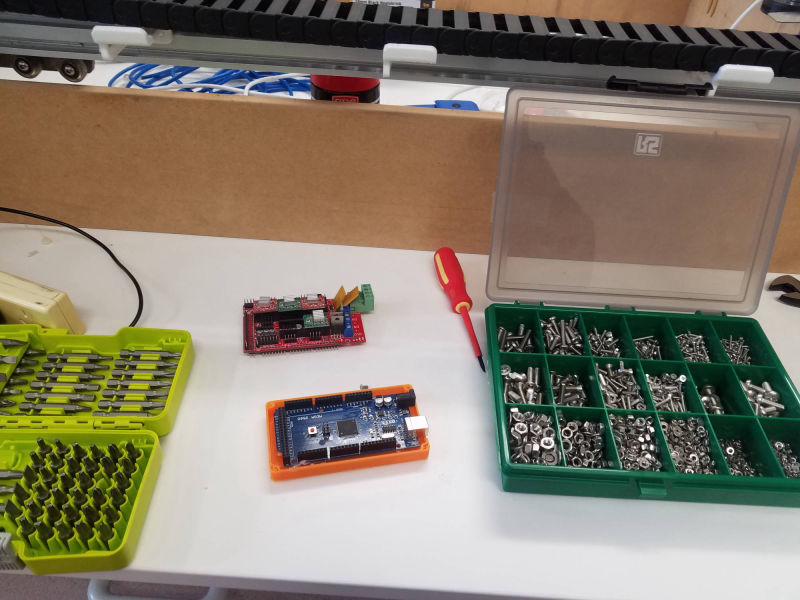
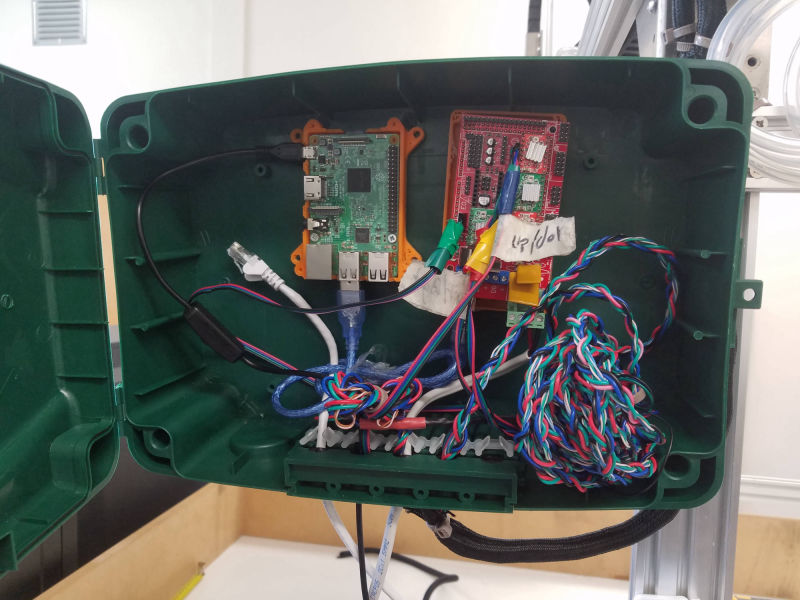
Our first challenge was to check over the progress from past teams and continue working on the project to get it closer to an operational standard.
This meant gathering and analysing documentation which was spread out over it's gitlab.op-bit.nz repository.
Although the gitlab repo was there it took some time to gain access due to in-house servers which it is hosted on, crashing then lack of documentation on account details etc.
Collaborating with the dev op's team, gave us access to the Farmbot repo and it's account.
We decided to create a github repo for future use, access and documentation.
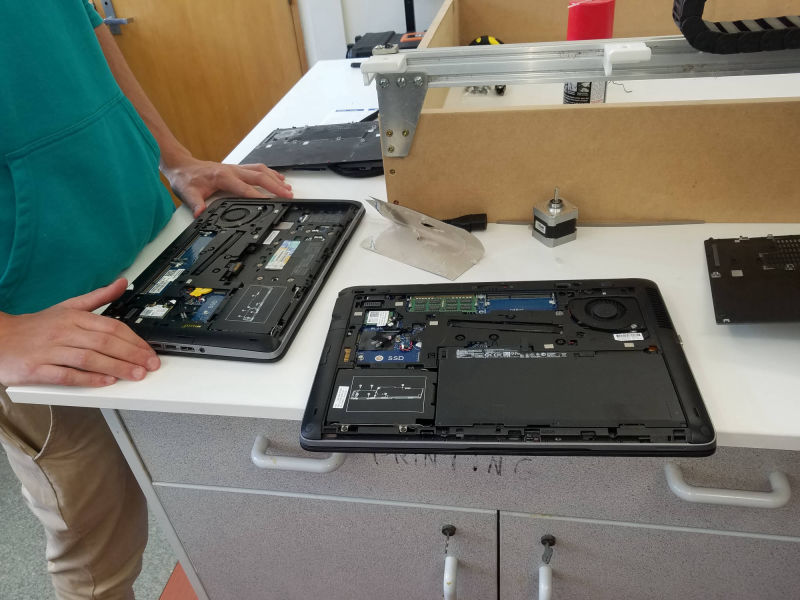
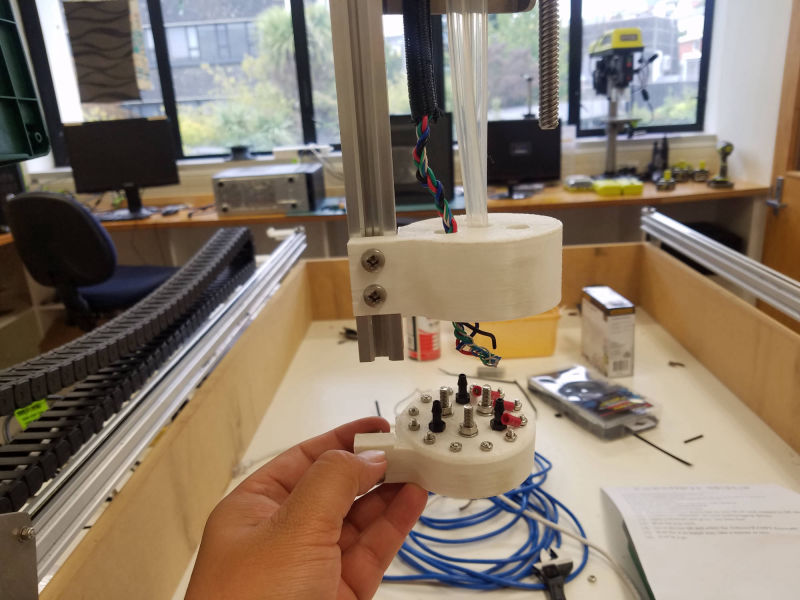
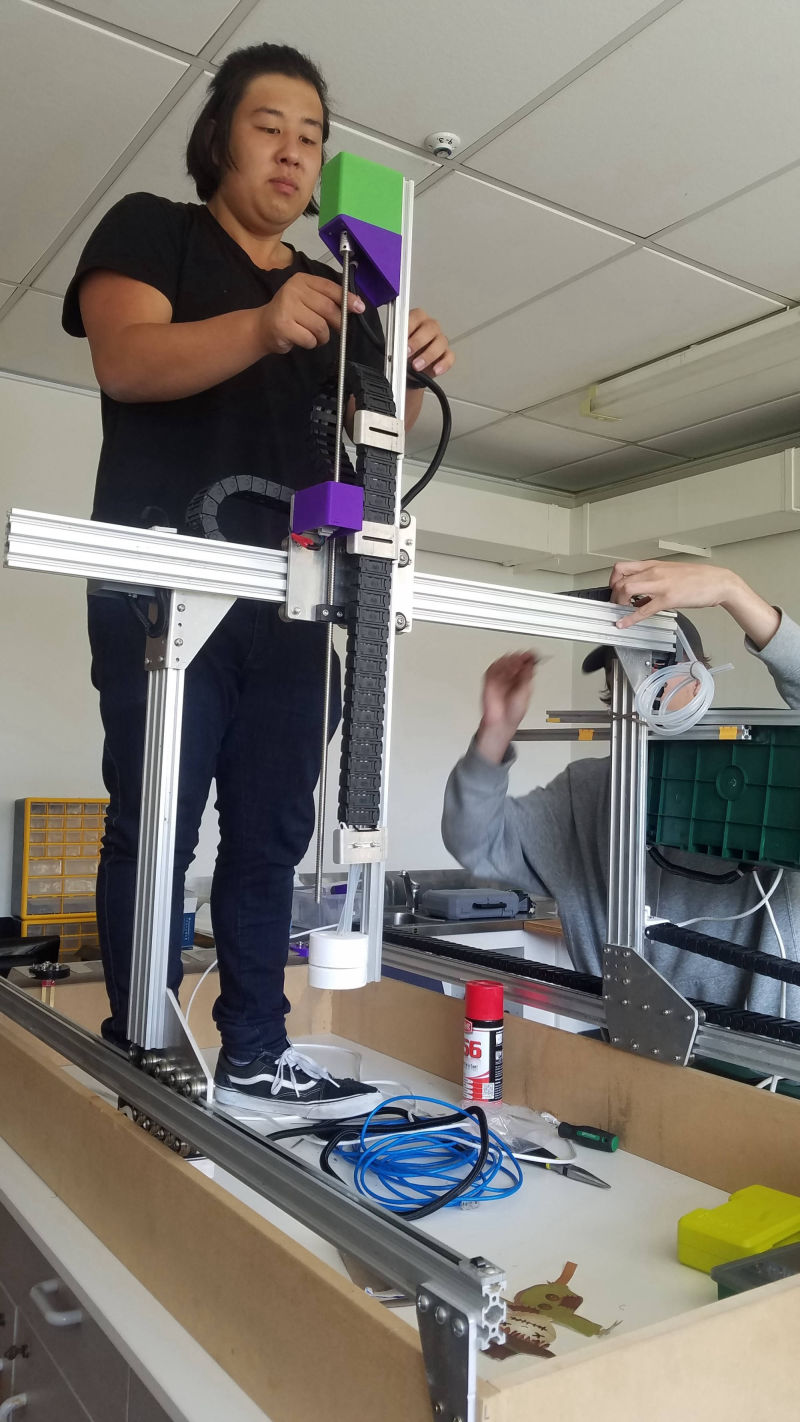
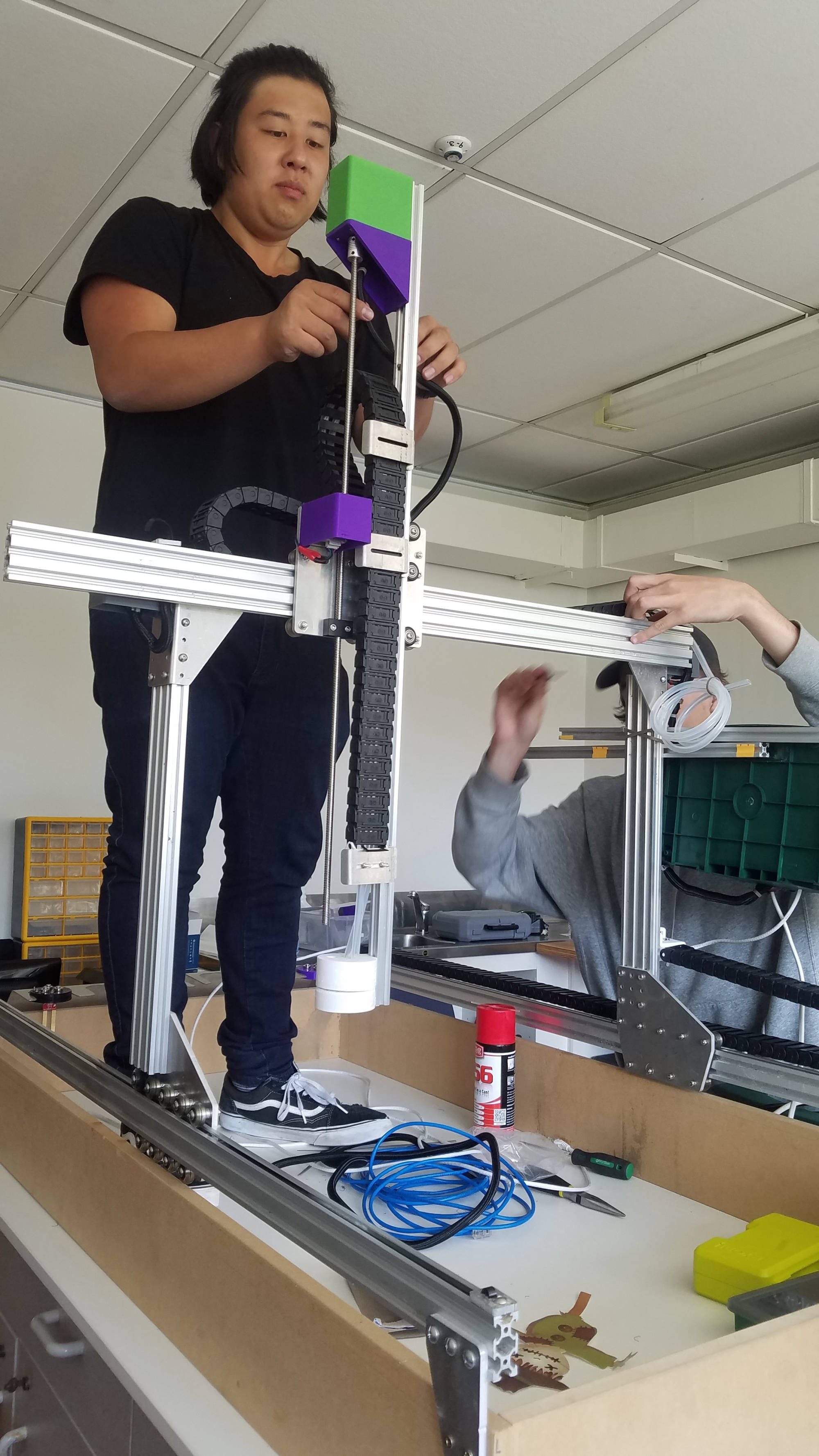
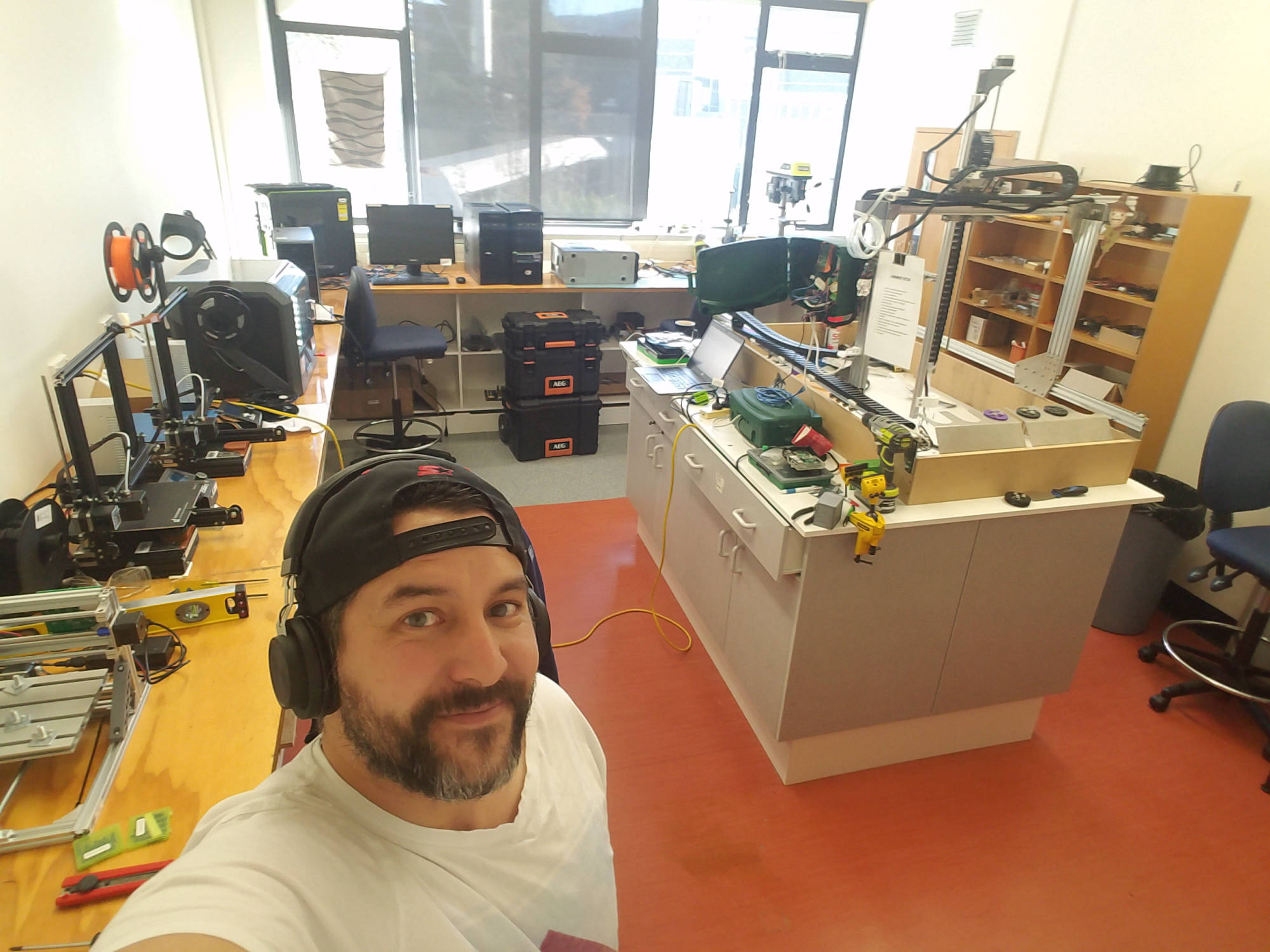
Moving the farmbot to the newly refurbished workshop gave us greater advantage in continuing it's next stage in the project.